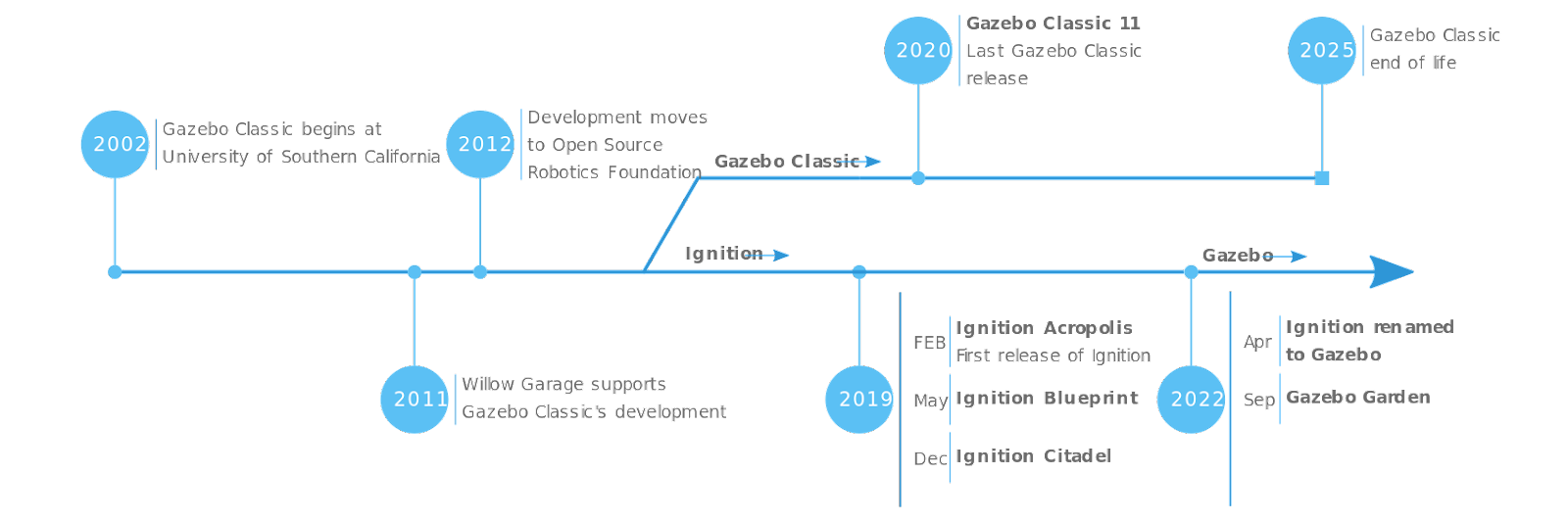
Gazebo Gazebo 사용에 대한 내용 정리 2022년 7월, 연구실에서 진행하는 과제를 통해 Gazebo를 사용해보기 시작했다. 설치부터 시뮬레이션 사용까지 알아두면 좋을 내용들을 적어 두려고 한다. Gazebo를 설치하려고 보니 https://gazebosim.org/home 와 https://classic.gazebosim.org/ 두 개의 페이지가 존재했다. 어떤 것을 참고해서 설치 해야 할지 헷갈렸었는데 about 페이지에 설명을 보고 어떤 차이가 있는지 알 수 있었다. (아마도 2019년) Gazebo Classic과 Gazebo로 두 개의 branch로 나뉘어 개발이 진행되었고, Gazebo Classic은 2025년까지 지원해준다고 한다. History 설명을 읽어보니 브랜치를 나누면서 Ignition이라는 이름으로 바꿨는데 상표권 문제로 인해 다시 Gazebo로 바꿨다고 한다. Gazebo에서 Dart 물리엔진을 사용하기 위해 이번에 새로 설치하게 되었는데, 나의 경우 향후 지원을 고려하여 'Gazebo'를 사용하고자 한다. 설치할 때 아래 설명 중, 반드시 main documentation에 들어가서 Releases를 확인하도록 하자! 2022. 07. 27. 현재 기준 Fortress가 recommended version이고 Garden은 아직 개발 중인 버전인데 제대로 확인 안 하고 the latest installation tutorial here에 들어갔더니 Garden 설치에 대한 안내가 되어있어서 고생만 하고 제대로 설치하지 못 했다. Recommened version에 들어가서 Binary installation을 통해 설치 해 주도록 하자. 나 ...